3.2. Puls
3.2.2. Promjena zamaha tijela
Da biste primijenili zakone promjene i održanja impulsa, morate biti u stanju izračunati promjenu impulsa.
Promjena momentaΔ P → tijelo je određeno formulom
Δ P → = P → 2 − P → 1 ,
gdje je P → 1 = m v → 1 - početni impuls tijela; P → 2 = m v → 2 - njegov konačni impuls; m - tjelesna težina; v → 1 - početna brzina tijela; v → 2 je njegova konačna brzina.
Za izračunavanje promjene impulsa tijela preporučljivo je koristiti sljedeći algoritam:
1) odabrati koordinatni sistem i pronaći projekcije početnog P → 1 i konačnog P → 2 impulsa tijela na koordinatne ose:
P 1 x , P 2 x ;
P 1 y , P 2 y ;
∆P x = P 2 x − P 1 x ;
∆P y = P 2 y − P 1 y ;
3) izračunati modul vektora promjene momenta Δ P → as
Δ P = Δ P x 2 + Δ P y 2 .
Primjer 4. Tijelo pada pod uglom od 30° u odnosu na vertikalu na horizontalnu ravan. Odrediti modul promjene količine gibanja tijela pri udaru ako je u trenutku dodira s ravninom modul impulsa tijela 15 kg m/s. Udar tijela o ravninu smatra se apsolutno elastičnim.
Rješenje. Tijelo koje pada na horizontalnu površinu pod određenim uglom α u odnosu na vertikalu i sudari se s tom površinom je apsolutno elastično,
- prvo, zadržava modul svoje brzine nepromijenjenim, a samim tim i veličinu impulsa:
P 1 = P 2 = P ;
- drugo, odbija se od površine pod istim uglom pod kojim pada na nju:
α 1 = α 2 = α,
gdje je P 1 = mv 1 - modul impulsa tijela prije udara; P 2 = mv 2 - modul impulsa tijela nakon udara; m - tjelesna težina; v 1 - vrijednost brzine tijela prije udara; v 2 - veličina brzine tijela nakon udara; α 1 - upadni ugao; α 2 - ugao refleksije.
Navedeni tjelesni impulsi, uglovi i koordinatni sistem prikazani su na slici.
Za izračunavanje modula promjene impulsa tijela koristimo algoritam:
1) zapisujemo projekcije impulsa prije i nakon što tijelo udari u površinu na koordinatne osi:
P 1 x = mv sin α, P 2 x = mv sin α;
P 1 y = −mv cos α, P 2 y = mv cos α;
2) pronađite projekcije promjene impulsa na koordinatne ose koristeći formule
Δ P x = P 2 x − P 1 x = m v sin α − m v sin α = 0 ;
Δ P y = P 2 y − P 1 y = m v cos α − (− m v cos α) = 2 m v cos α ;
Δ P = (Δ P x) 2 + (Δ P y) 2 = (Δ P y) 2 = | Δ P y | = 2 m v cos α .
Vrijednost P = mv je navedena u iskazu problema; Stoga ćemo izračunati modul promjene momenta pomoću formule
Δ P = 2 P cos 30 ° = 2 ⋅ 15 ⋅ 0,5 3 ≈ 26 kg ⋅ m/s.
Primjer 5. Kamen mase 50 g bačen je pod uglom od 45° u odnosu na horizontalu brzinom od 20 m/s. Pronađite modul promjene momenta gibanja kamena tokom leta. Zanemarite otpor vazduha.
Rješenje. Ako nema otpora zraka, tada se tijelo kreće duž simetrične parabole; pri čemu
- prvo, vektor brzine u tački udara tijela čini ugao β sa horizontom jednak kutu α (α je ugao između vektora brzine tijela u tački bacanja i horizonta):
- drugo, moduli brzine u tački bacanja v 0 i u tački udara tijela v su također isti:
v 0 = v ,
gdje je v 0 brzina tijela u tački bacanja; v je brzina tijela u tački udara; α je ugao koji vektor brzine pravi sa horizontom u tački bacanja tijela; β je ugao koji vektor brzine pravi sa horizontom u tački udara tijela.
Vektori tjelesne brzine (vektori momenta) i uglovi prikazani su na slici.

Za izračunavanje modula promjene impulsa tijela tokom leta koristimo se algoritamom:
1) zapisujemo projekcije impulsa za tačku bacanja i za tačku udara na koordinatne osi:
P 1 x = mv 0 cos α, P 2 x = mv 0 cos α;
P 1 y = mv 0 sin α, P 2 y = −mv 0 sin α;
2) pronađite projekcije promjene impulsa na koordinatne ose koristeći formule
Δ P x = P 2 x − P 1 x = m v 0 cos α − m v 0 cos α = 0 ;
Δ P y = P 2 y − P 1 y = − m v 0 sin α − m v 0 sin α = − 2 m v 0 sin α ;
3) izračunati modul promjene momenta kao
Δ P = (Δ P x) 2 + (Δ P y) 2 = (Δ P y) 2 = | Δ P y | = 2 m v 0 sin α ,
gdje je m tjelesna težina; v 0 - modul početne brzine tijela.
Stoga ćemo izračunati modul promjene momenta pomoću formule
Δ P = 2 m v 0 sin 45 ° = 2 ⋅ 50 ⋅ 10 − 3 ⋅ 20 ⋅ 0,5 2 ≈ 1,4 kg ⋅ m/s.
Tjelesni impuls
Moment kretanja tijela je veličina jednaka proizvodu mase tijela i njegove brzine.
Treba to zapamtiti mi pričamo o tome o tijelu koje se može predstaviti kao materijalna tačka. Zamah tijela ($p$) se također naziva impulsom. Koncept impulsa u fiziku je uveo René Descartes (1596–1650). Termin “impuls” pojavio se kasnije (impulsus na latinskom znači “gurati”). Moment je vektorska veličina (poput brzine) i izražava se formulom:
$p↖(→)=mυ↖(→)$
Smjer vektora impulsa uvijek se poklapa sa smjerom brzine.
SI jedinica impulsa je impuls tijela mase $1$ kg koje se kreće brzinom od $1$ m/s, dakle, jedinica impulsa je $1$ kg $·$ m/s.
Ako konstantna sila djeluje na tijelo (materijalnu tačku) tokom vremenskog perioda $∆t$, tada će i ubrzanje biti konstantno:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
gdje su $(υ_1)↖(→)$ i $(υ_2)↖(→)$ početna i konačna brzina tijela. Zamjenom ove vrijednosti u izraz drugog Newtonovog zakona, dobijamo:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Otvarajući zagrade i koristeći izraz za impuls tijela, imamo:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Ovdje je $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ promjena zamaha tokom vremena $∆t$. Tada će prethodna jednačina poprimiti oblik:
$∆p↖(→)=F↖(→)∆t$
Izraz $∆p↖(→)=F↖(→)∆t$ je matematički prikaz drugog Newtonovog zakona.
Zove se proizvod sile i trajanja njenog djelovanja impuls sile. Zbog toga promjena količine gibanja tačke jednaka je promjeni količine gibanja sile koja na nju djeluje.
Izraz $∆p↖(→)=F↖(→)∆t$ naziva se jednačina kretanja tijela. Treba napomenuti da se ista radnja - promjena momenta gibanja tačke - može postići malom silom u dužem vremenskom periodu i velikom silom u kratkom vremenskom periodu.
Impuls sistema tel. Zakon promjene momenta
Impuls (količina kretanja) mehaničkog sistema je vektor jednak zbiru impulsa svih materijalnih tačaka ovog sistema:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Zakoni promjene i održanja impulsa posljedica su drugog i trećeg Newtonovog zakona.
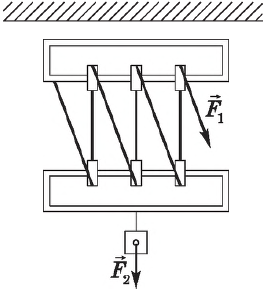
Razmotrimo sistem koji se sastoji od dva tijela. Sile ($F_(12)$ i $F_(21)$ na slici s kojima tijela sistema međusobno djeluju nazivaju se unutrašnjim.
Neka, pored unutrašnjih sila, na sistem djeluju i vanjske sile $(F_1)↖(→)$ i $(F_2)↖(→)$. Za svako tijelo možemo napisati jednačinu $∆p↖(→)=F↖(→)∆t$. Zbrajanjem lijeve i desne strane ovih jednačina dobijamo:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Prema trećem Newtonovom zakonu, $(F_(12))↖(→)=-(F_(21))↖(→)$.
dakle,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
Na lijevoj strani nalazi se geometrijski zbir promjena impulsa svih tijela sistema, jednak promjeni impulsa samog sistema - $(∆p_(syst))↖(→)$ računa, jednakost $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ može se napisati:
$(∆p_(syst))↖(→)=F↖(→)∆t$
gdje je $F↖(→)$ zbir svih vanjskih sila koje djeluju na tijelo. Dobijeni rezultat znači da se impuls sistema može mijenjati samo vanjskim silama, a promjena momenta kretanja sistema je usmjerena na isti način kao i ukupna vanjska sila. Ovo je suština zakona promjene količine gibanja mehaničkog sistema.
Unutrašnje sile ne mogu promijeniti ukupni zamah sistema. One samo menjaju impulse pojedinih tela sistema.
Zakon održanja impulsa
Iz jednačine $(∆p_(syst))↖(→)=F↖(→)∆t$ slijedi zakon održanja impulsa. Ako na sistem ne djeluju vanjske sile, desna strana jednačine $(∆p_(syst))↖(→)=F↖(→)∆t$ postaje nula, što znači da ukupni impuls sistema ostaje nepromijenjen :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Sistem na koji ne djeluju vanjske sile ili je rezultanta vanjskih sila nula naziva se zatvoreno.
Zakon održanja impulsa glasi:
Ukupni impuls zatvorenog sistema tijela ostaje konstantan za bilo koju interakciju tijela sistema jedno s drugim.
Dobijeni rezultat vrijedi za sistem koji sadrži proizvoljan broj tijela. Ako zbir vanjskih sila nije jednak nuli, ali je zbir njihovih projekcija na neki smjer jednak nuli, tada se projekcija impulsa sistema na ovaj smjer ne mijenja. Tako se, na primjer, sistem tijela na površini Zemlje ne može smatrati zatvorenim zbog sile gravitacije koja djeluje na sva tijela, međutim zbir projekcija impulsa u horizontalnom smjeru može ostati nepromijenjen (u odsustvu trenja), budući da u ovom smjeru ne djeluje sila gravitacije.
Mlazni pogon
Razmotrimo primjere koji potvrđuju valjanost zakona održanja impulsa.
Uzmimo dječju gumenu loptu, naduvamo je i pustimo. Videćemo da kada vazduh počne da ga napušta u jednom pravcu, lopta će leteti u drugom. Kretanje lopte je primjer mlaznog kretanja. Objašnjava se zakonom održanja količine gibanja: ukupni impuls sistema „loptica plus vazduh u njoj“ pre nego što vazduh iscuri je nula; mora ostati jednak nuli tokom kretanja; dakle, lopta se kreće u smjeru suprotnom od smjera strujanja mlaza, i to takvom brzinom da je njen zamah po veličini jednak impulsu vazdušnog mlaza.
Jet motion nazivamo kretanje tijela koje nastaje kada se neki njegov dio odvoji od njega bilo kojom brzinom. Zbog zakona održanja količine gibanja, smjer kretanja tijela je suprotan smjeru kretanja odvojenog dijela.
Letovi raketama se zasnivaju na principu mlaznog pogona. Moderna svemirska raketa je veoma složen aviona. Masa rakete sastoji se od mase radnog fluida (tj. vrelih gasova koji nastaju kao rezultat sagorevanja goriva i koji se emituju u obliku mlazne struje) i konačne, ili, kako kažu, „suhe“ mase raketa preostala nakon što se radni fluid izbaci iz rakete.
Kada se mlaz gasa izbacuje iz rakete velikom brzinom, sama raketa juri u suprotnom smjeru. Prema zakonu održanja količine gibanja, zamah $m_(p)υ_p$ dobijen od strane rakete mora biti jednak impulsu $m_(gas)·υ_(gas)$ izbačenih plinova:
$m_(p)υ_p=m_(gas)·υ_(gas)$
Iz toga slijedi da je brzina rakete
$υ_p=((m_(gas))/(m_p))·υ_(gas)$
Iz ove formule jasno je da što je veća brzina rakete, to je veća brzina emitovanih gasova i odnos mase radnog fluida (tj. mase goriva) i konačnog („suvog“) masa rakete.
Formula $υ_p=((m_(gas))/(m_p))·υ_(gas)$ je približna. Ne uzima se u obzir da kako gorivo sagorijeva, masa leteće rakete postaje sve manja. Tačnu formulu za brzinu rakete dobio je 1897. K. E. Tsiolkovsky i nosi njegovo ime.
Rad sile
Termin „rad“ je u fiziku uveo francuski naučnik J. Poncelet 1826. godine. Ako se u svakodnevnom životu rad naziva samo ljudskim radom, onda je u fizici, a posebno u mehanici, općenito prihvaćeno da se rad obavlja silom. Fizička količina rada obično se označava slovom $A$.
Rad sile je mjera djelovanja sile, u zavisnosti od njene veličine i smjera, kao i od kretanja tačke primjene sile. Za konstantna sila i pravolinijskog kretanja, rad je određen jednakošću:
$A=F|∆r↖(→)|cosα$
gdje je $F$ sila koja djeluje na tijelo, $∆r↖(→)$ je pomak, $α$ je ugao između sile i pomaka.

Rad sile jednak je proizvodu modula sile i pomaka i kosinusa ugla između njih, tj. skalarnom proizvodu vektora $F↖(→)$ i $∆r↖(→)$.
Rad je skalarna veličina. Ako je $α 0$, a ako je $90°
Kada na tijelo djeluje više sila, ukupan rad (zbir rada svih sila) jednak je radu rezultirajuće sile.
Jedinica rada u SI je joule($1$ J). $1$ J je rad koji izvrši sila od $1$ N duž puta od $1$ m u smjeru djelovanja ove sile. Ova jedinica je nazvana po engleskom naučniku J. Jouleu (1818-1889): $1$ J = $1$ N $·$ m Kilodžuli i milidžuli se također često koriste: $1$ kJ $= 1,000$ J, $1$ mJ $. = 0,001 USD J.
Rad gravitacije
Razmotrimo tijelo koje klizi duž nagnute ravni sa uglom nagiba $α$ i visinom $H$.

Izrazimo $∆x$ u terminima $H$ i $α$:
$∆x=(H)/(sinα)$
Uzimajući u obzir da sila gravitacije $F_t=mg$ čini ugao ($90° - α$) sa smjerom kretanja, koristeći formulu $∆x=(H)/(sin)α$, dobijamo izraz za rad gravitacije $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
Iz ove formule je jasno da rad gravitacije zavisi od visine i ne zavisi od ugla nagiba ravnine.
Iz toga slijedi da:
- rad gravitacije ne zavisi od oblika putanje po kojoj se telo kreće, već samo od početnog i konačnog položaja tela;
- kada se tijelo kreće po zatvorenoj putanji, rad gravitacije je nula, tj. gravitacija je konzervativna sila (sile koje imaju ovo svojstvo nazivaju se konzervativne).
Rad reakcionih snaga, jednaka je nuli, pošto je sila reakcije ($N$) usmjerena okomito na pomak $∆x$.
Rad sile trenja
Sila trenja je usmjerena suprotno od pomaka $∆x$ i sa njom čini ugao od $180°$, stoga je rad sile trenja negativan:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
Pošto je $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ onda
$A_(tr)=μmgHctgα$
Rad elastične sile
Neka vanjska sila $F↖(→)$ djeluje na nerastegnutu oprugu dužine $l_0$, istežući je za $∆l_0=x_0$. U poziciji $x=x_0F_(kontrola)=kx_0$. Nakon što sila $F↖(→)$ prestane djelovati u tački $x_0$, opruga se sabija pod djelovanjem sile $F_(kontrola)$.

Odredimo rad elastične sile kada se koordinata desnog kraja opruge promijeni sa $x_0$ na $x$. Budući da se elastična sila u ovom području mijenja linearno, Hookeov zakon može koristiti njenu prosječnu vrijednost u ovoj oblasti:
$F_(kontrolna pros.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Tada je rad (uzimajući u obzir činjenicu da se pravci $(F_(control av.))↖(→)$ i $(∆x)↖(→)$ podudaraju) jednak:
$A_(kontrola)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Može se pokazati da oblik posljednje formule ne zavisi od ugla između $(F_(kontrola av.))↖(→)$ i $(∆x)↖(→)$. Rad elastičnih sila ovisi samo o deformacijama opruge u početnom i konačnom stanju.
Dakle, sila elastičnosti, kao i sila gravitacije, je konzervativna sila.
Power power
Snaga je fizička veličina koja se mjeri odnosom rada i vremena u kojem se proizvodi.
Drugim riječima, snaga pokazuje koliko se rada obavi u jedinici vremena (u SI - po $1$ s).
Snaga se određuje po formuli:
gdje je $N$ snaga, $A$ je rad obavljen za vrijeme $∆t$.
Zamjenom u formulu $N=(A)/(∆t)$ umjesto rada $A$ njegov izraz $A=F|(∆r)↖(→)|cosα$, dobijamo:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Snaga je jednaka proizvodu veličina vektora sile i brzine i kosinusa ugla između ovih vektora.
Snaga u SI sistemu se mjeri u vatima (W). Jedan vat ($1$ W) je snaga pri kojoj se $1$ J obavlja rad za $1$ s: $1$ W $= 1$ J/s.
Ova jedinica je dobila ime po engleskom pronalazaču J. Watt-u (Watt), koji je napravio prvu parnu mašinu. Sam J. Watt (1736-1819) koristio je drugu jedinicu snage - konjske snage (KS), koju je uveo da bi mogao uporediti performanse parne mašine i konja: 1$ KS. $= 735,5$ W.
U tehnologiji se često koriste veće jedinice snage - kilovat i megavat: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Kinetička energija. Zakon promjene kinetičke energije
Ako tijelo ili nekoliko tijela u interakciji (sistem tijela) mogu obavljati rad, onda se kaže da imaju energiju.
Riječ "energija" (od grčkog energia - djelovanje, aktivnost) često se koristi u svakodnevnom životu. Na primjer, ljudi koji rade brzo se nazivaju energičnima, koji imaju veliku energiju.
Energija koju tijelo posjeduje zbog kretanja naziva se kinetička energija.
Kao iu slučaju definicije energije općenito, za kinetičku energiju možemo reći da je kinetička energija sposobnost tijela koje se kreće da izvrši rad.
Nađimo kinetičku energiju tijela mase $m$ koje se kreće brzinom $υ$. Budući da je kinetička energija energija zbog kretanja, njeno nulto stanje je stanje u kojem tijelo miruje. Nakon što smo pronašli rad potreban da se nekom tijelu prenese određena brzina, naći ćemo njegovu kinetičku energiju.
Da bismo to učinili, izračunajmo rad u području pomaka $∆r↖(→)$ kada se poklapaju smjerovi vektora sile $F↖(→)$ i pomaka $∆r↖(→)$. U ovom slučaju rad je jednak
gdje je $∆x=∆r$

Za kretanje tačke sa ubrzanjem $α=const$, izraz za pomicanje ima oblik:
$∆x=υ_1t+(at^2)/(2),$
gdje je $υ_1$ početna brzina.
Zamijenivši u jednačinu $A=F·∆x$ izraz za $∆x$ iz $∆x=υ_1t+(at^2)/(2)$ i koristeći drugi Newtonov zakon $F=ma$, dobijamo:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Izražavanje ubrzanja kroz početnu $υ_1$ i konačnu $υ_2$ brzine $a=(υ_2-υ_1)/(t)$ i zamjenu u $A=ma(υ_1t+(at^2)/(2))=(mat )/ (2)(2υ_1+at)$ imamo:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Pošto se sada izjednačio početna brzina na nulu: $υ_1=0$, dobijamo izraz za kinetička energija:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Dakle, tijelo koje se kreće ima kinetičku energiju. Ova energija je jednaka radu koji se mora obaviti da se brzina tijela poveća od nule do vrijednosti $υ$.
Iz $E_K=(mυ)/(2)=(p^2)/(2m)$ slijedi da je rad koji izvrši sila da pomjeri tijelo iz jednog položaja u drugi jednak promjeni kinetičke energije:
$A=E_(K_2)-E_(K_1)=∆E_K$
Jednakost $A=E_(K_2)-E_(K_1)=∆E_K$ izražava teorema o promjeni kinetičke energije.
Promjena kinetičke energije tijela(materijalna tačka) za određeni vremenski period jednaka je radu koji za to vrijeme izvrši sila koja djeluje na tijelo.
Potencijalna energija
Potencijalna energija je energija određena relativnim položajem tijela ili dijelova istog tijela u interakciji.
Pošto je energija definisana kao sposobnost tela da izvrši rad, potencijalna energija se prirodno definiše kao rad sile, koji zavisi samo od relativnog položaja tela. Ovo je rad gravitacije $A=mgh_1-mgh_2=mgH$ i rad elastičnosti:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Potencijalna energija tijela u interakciji sa Zemljom, oni nazivaju količinu jednaku proizvodu mase $m$ ovog tijela ubrzanjem slobodnog pada $g$ i visinom $h$ tijela iznad površine Zemlje:
Potencijalna energija elastično deformiranog tijela je vrijednost jednaka polovini proizvoda koeficijenta elastičnosti (krutosti) $k$ tijela i kvadratne deformacije $∆l$:
$E_p=(1)/(2)k∆l^2$
Rad konzervativnih sila (gravitacije i elastičnosti), uzimajući u obzir $E_p=mgh$ i $E_p=(1)/(2)k∆l^2$, izražava se na sljedeći način:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Ova formula nam omogućava da damo opštu definiciju potencijalne energije.
Potencijalna energija sistema je veličina koja zavisi od položaja tela čija je promena pri prelasku sistema iz početnog stanja u konačno stanje jednaka radu unutrašnjih konzervativnih sila sistema, uzeti sa suprotnim predznakom.
Znak minus na desnoj strani jednačine $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ znači da kada rad obavljaju unutrašnje sile ( na primjer, pada tijela na tlo pod uticajem gravitacije u sistemu „kamena-zemlja“), energija sistema se smanjuje. Rad i promjene potencijalne energije u sistemu uvijek imaju suprotne predznake.
Pošto rad određuje samo promjenu potencijalne energije, onda samo promjena energije ima fizičko značenje u mehanici. Stoga je izbor nultog energetskog nivoa proizvoljan i određen isključivo zbog pogodnosti, na primjer, lakoće pisanja odgovarajućih jednačina.
Zakon promjene i održanja mehaničke energije
Ukupna mehanička energija sistema zbir njegove kinetičke i potencijalne energije naziva se:
Određuje se položajem tijela (potencijalna energija) i njihovom brzinom (kinetička energija).
Prema teoremi kinetičke energije,
$E_k-E_(k_1)=A_p+A_(pr),$
gdje je $A_p$ rad potencijalnih sila, $A_(pr)$ je rad ne-potencijalnih sila.
Zauzvrat, rad potencijalnih sila jednak je razlici potencijalne energije tijela u početnom $E_(p_1)$ i konačnom $E_p$ stanju. Uzimajući ovo u obzir, dobijamo izraz za zakon promjene mehaničke energije:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
gdje je lijeva strana jednakosti promjena ukupne mehaničke energije, a desna je rad nepotencijalnih sila.
dakle, zakon promjene mehaničke energije glasi:
Promjena mehaničke energije sistema jednaka je radu svih nepotencijalnih sila.
Mehanički sistem u kojem djeluju samo potencijalne sile naziva se konzervativan.
U konzervativnom sistemu $A_(pr) = 0$. ovo implicira zakon održanja mehaničke energije:
U zatvorenom konzervativnom sistemu, ukupna mehanička energija je očuvana (ne mijenja se s vremenom):
$E_k+E_p=E_(k_1)+E_(p_1)$
Zakon održanja mehaničke energije izveden je iz Newtonovih zakona mehanike, koji su primenljivi na sistem materijalnih tačaka (ili makročestica).
Međutim, zakon održanja mehaničke energije vrijedi i za sistem mikročestica, gdje sami Newtonovi zakoni više ne vrijede.
Zakon održanja mehaničke energije je posljedica jednoličnosti vremena.
Ujednačenost vremena je da, pod istim početnim uslovima, pojava fizičkih procesa ne zavisi od toga u kom trenutku su ti uslovi stvoreni.
Zakon održanja ukupne mehaničke energije znači da kada se kinetička energija u konzervativnom sistemu promijeni, mora se promijeniti i njegova potencijalna energija, tako da njihov zbir ostane konstantan. To znači mogućnost pretvaranja jedne vrste energije u drugu.
U skladu sa različitim oblicima kretanja materije, razmatraju se različite vrste energije: mehanička, unutrašnja (jednaka zbiru kinetičke energije haotičnog kretanja molekula u odnosu na centar mase tela i potencijalne energije interakcija molekula međusobno), elektromagnetska, hemijska (koja se sastoji od kinetičke energije kretanja elektrona i električna energija njihove međusobne interakcije i sa atomskim jezgrima), nuklearne itd. Iz navedenog je jasno da je podjela energije na različite vrste Sasvim uslovno.
Prirodne pojave obično su praćene transformacijom jedne vrste energije u drugu. Na primjer, trenje dijelova raznih mehanizama dovodi do pretvaranja mehaničke energije u toplinu, tj. unutrašnja energija. U toplotnim motorima, naprotiv, unutrašnja energija se pretvara u mehaničku energiju; u galvanskim ćelijama hemijska energija se pretvara u električnu energiju itd.
Trenutno je koncept energije jedan od osnovnih koncepata fizike. Ovaj koncept je neraskidivo povezan sa idejom transformacije jednog oblika kretanja u drugi.
Ovako je koncept energije formuliran u modernoj fizici:
Energija je opća kvantitativna mjera kretanja i interakcije svih vrsta materije. Energija se ne pojavljuje ni iz čega i ne nestaje, može samo prelaziti iz jednog oblika u drugi. Koncept energije povezuje sve prirodne pojave.
Jednostavni mehanizmi. Efikasnost mehanizma
Jednostavni mehanizmi su uređaji koji mijenjaju veličinu ili smjer sila koje se primjenjuju na tijelo.
Koriste se za pomicanje ili podizanje velikih tereta uz malo napora. To uključuje polugu i njene varijante - blokove (pokretne i fiksne), kapije, nagnutu ravninu i njene vrste - klin, vijak itd.
Ruka poluge. Pravilo poluge
Poluga je kruto tijelo sposobno da se okreće oko fiksnog oslonca.

Pravilo poluge kaže:
Poluga je u ravnoteži ako su sile primijenjene na nju obrnuto proporcionalne njihovim rukama:
$(F_2)/(F_1)=(l_1)/(l_2)$
Iz formule $(F_2)/(F_1)=(l_1)/(l_2)$, primjenjujući svojstvo proporcije na nju (proizvod ekstremnih članova proporcije jednak je proizvodu njenih srednjih članova), mi može dobiti sljedeću formulu:
Ali $F_1l_1=M_1$ je moment sile koja teži da okrene ručicu u smjeru kazaljke na satu, a $F_2l_2=M_2$ je moment sile koja pokušava da okrene ručicu u smjeru suprotnom od kazaljke na satu. Dakle, $M_1=M_2$, što je trebalo dokazati.
Polugu su ljudi počeli koristiti u davna vremena. Uz njegovu pomoć bilo je moguće podići teške kamene ploče tokom izgradnje piramida u starom Egiptu. Bez poluge ovo ne bi bilo moguće. Uostalom, na primjer, za izgradnju Keopsove piramide, koja ima visinu od 147$ m, utrošeno je više od dva miliona kamenih blokova, od kojih je najmanji težio 2,5$ tona!
Danas se poluge široko koriste kako u proizvodnji (na primjer, dizalice), tako iu svakodnevnom životu (makaze, rezači žice, vage).
Fiksni blok
Djelovanje fiksnog bloka je slično djelovanju poluge sa jednakim krakovima: $l_1=l_2=r$. Primijenjena sila $F_1$ jednaka je opterećenju $F_2$, a uvjet ravnoteže je:
Fiksni blok koristi se kada trebate promijeniti smjer sile bez promjene njene veličine.
Pokretni blok
Pokretni blok djeluje slično kao i poluga, čiji su krakovi: $l_2=(l_1)/(2)=r$. U ovom slučaju, uvjet ravnoteže ima oblik:
gdje je $F_1$ primijenjena sila, $F_2$ je opterećenje. Upotreba pokretnog bloka daje dvostruko povećanje snage.
Dizalica sa remenicama (blok sistem)
Obična lančana dizalica sastoji se od $n$ pokretnih i $n$ fiksnih blokova. Njegovo korištenje daje dobit u snazi od $2n$ puta:
$F_1=(F_2)/(2n)$
Električna lančana dizalica sastoji se od n pokretnih i jednog fiksnog bloka. Korištenje remenice daje snagu od $2^n$ puta:
$F_1=(F_2)/(2^n)$

Screw
Vijak je nagnuta ravan namotana oko ose.

Uslov ravnoteže za sile koje djeluju na propeler ima oblik:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

gdje je $F_1$ vanjska sila primijenjena na propeler i djeluje na udaljenosti $R$ od njegove ose; $F_2$ je sila koja djeluje u smjeru ose propelera; $h$ — korak propelera; $r$ je prosječni radijus navoja; $α$ je ugao nagiba niti. $R$ je dužina poluge (ključa) koja rotira vijak sa silom od $F_1$.
Efikasnost
Koeficijent korisna akcija(efikasnost) - omjer korisnog rada i cjelokupnog utrošenog rada.
Efikasnost se često izražava u postocima i označava se grčkim slovom $η$ („ovo“):
$η=(A_p)/(A_3)·100%$
gdje je $A_n$ koristan rad, $A_3$ je sav potrošeni rad.
Korisni rad uvijek čini samo dio ukupnog rada koji osoba provodi koristeći jedan ili drugi mehanizam.
Dio obavljenog posla troši se na savladavanje sila trenja. Pošto je $A_3 > A_n$, efikasnost je uvijek manja od $1$ (ili $< 100%$).
Pošto se svako od djela u ovoj jednakosti može izraziti kao proizvod odgovarajuće sile i prijeđenog puta, može se prepisati na sljedeći način: $F_1s_1≈F_2s_2$.
Iz toga slijedi da, dobivši uz pomoć mehanizma na snazi, gubimo isti broj puta usput, i obrnuto. Ovaj zakon se naziva zlatnim pravilom mehanike.
Zlatno pravilo mehanike je približan zakon, jer ne uzima u obzir rad savladavanja trenja i gravitacije dijelova uređaja koji se koriste. Ipak, može biti vrlo korisno u analizi rada bilo kojeg jednostavnog mehanizma.

Tako, na primjer, zahvaljujući ovom pravilu možemo odmah reći da će radnik prikazan na slici, uz dvostruko povećanje sile podizanja tereta za $10$ cm, morati spustiti suprotni kraj poluge za $20 $ cm.
Sudar tijela. Elastični i neelastični udari
Za rješavanje problema gibanja tijela nakon sudara koriste se zakoni održanja impulsa i mehaničke energije: iz poznatih impulsa i energija prije sudara određuju se vrijednosti ovih veličina nakon sudara. Razmotrimo slučajeve elastičnih i neelastičnih udara.
Udar se naziva apsolutno neelastičnim, nakon čega tijela formiraju jedno tijelo koje se kreće određenom brzinom. Problem brzine potonjeg rješava se korištenjem zakona održanja impulsa sistema tijela s masama $m_1$ i $m_2$ (ako govorimo o dva tijela) prije i nakon udara:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
Očigledno je da kinetička energija tijela tokom neelastičnog udara nije očuvana (na primjer, za $(υ_1)↖(→)=-(υ_2)↖(→)$ i $m_1=m_2$ postaje jednaka nuli nakon udara).
Udar u kojem je sačuvan ne samo zbir impulsa, već i zbir kinetičkih energija udarnih tijela naziva se apsolutno elastičnim.
Za apsolutno elastičan udar važe sljedeće jednačine:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
gdje su $m_1, m_2$ mase loptica, $υ_1, υ_2$ su brzine loptica prije udara, $υ"_1, υ"_2$ su brzine loptica nakon udara.
Njutnovi zakoni omogućavaju rešavanje različitih praktično važnih problema koji se tiču interakcije i kretanja tela. Veliki broj takvih problema povezan je, na primjer, sa pronalaženjem ubrzanja tijela koje se kreće ako su poznate sve sile koje djeluju na ovo tijelo. Zatim se druge veličine (trenutna brzina, pomak, itd.) određuju ubrzanjem.
Ali često je vrlo teško odrediti sile koje djeluju na tijelo. Stoga se za rješavanje mnogih problema koristi još jedna važna fizička veličina - impuls tijela.
- Moment kretanja tijela p je vektorska fizička veličina jednaka proizvodu mase tijela i njegove brzine
Moment je vektorska veličina. Smjer vektora impulsa tijela uvijek se poklapa sa smjerom vektora brzine kretanja.
SI jedinica impulsa je impuls tijela težine 1 kg koje se kreće brzinom od 1 m/s. To znači da je SI jedinica količine gibanja tijela 1 kg m/s.
Prilikom proračuna koristite jednačinu za projekcije vektora: r x = mv x.
Ovisno o smjeru vektora brzine u odnosu na odabranu X-osu, projekcija vektora momenta može biti pozitivna ili negativna.
Riječ “impuls” (impulsus) u prijevodu s latinskog znači “gurati”. Neke knjige koriste izraz "momentum" umjesto izraza "impuls".
Ova veličina je uvedena u nauku otprilike u istom periodu kada je Njutn otkrio zakone koji su kasnije nazvani po njemu (tj. kasno XVII V.).
Kada su tijela u interakciji, njihovi impulsi se mogu promijeniti. Ovo se može potvrditi jednostavnim iskustvom.
Dvije kuglice jednake mase obješene su na omče za navoj sa drvenog ravnala postavljenog na prsten za tronožac, kao što je prikazano na slici 44, a.
Rice. 44. Demonstracija zakona održanja impulsa
Lopta 2 je skrenuta od vertikale za ugao a (Sl. 44, b) i puštena. Vraćajući se na svoju prethodnu poziciju, udara loptu 1 i staje. U tom slučaju lopta 1 počinje da se kreće i odstupa za isti ugao a (slika 44, c).
U ovom slučaju je očito da se kao rezultat interakcije loptica promijenila količina gibanja svake od njih: za koliko je smanjena količina gibanja kugle 2, za isti se iznos povećao i impuls lopte 1.
Ako dva ili više tijela stupaju u interakciju samo jedno s drugim (tj. nisu izložena vanjskim silama), tada ova tijela čine zatvoreni sistem.
Zamah svakog od tijela uključenih u zatvoreni sistem može se promijeniti kao rezultat njihove međusobne interakcije. Ali
- vektorski zbir impulsa tijela koja čine zatvoreni sistem ne mijenja se tokom vremena za bilo kakva kretanja i interakcije ovih tijela
Ovo je zakon održanja impulsa.
Zakon održanja impulsa je također zadovoljen ako na tijela sistema djeluju vanjske sile čiji je vektorski zbir jednak nuli. Pokažimo to korištenjem Newtonovog drugog i trećeg zakona da izvedemo zakon održanja impulsa. Radi jednostavnosti, razmatramo sistem koji se sastoji od samo dva tijela - kuglica masa m 1 i m 2, koje se kreću pravolinijski jedna prema drugoj brzinama v 1 i v 2 (slika 45).

Rice. 45. Sistem od dva tijela - loptice koje se kreću pravolinijski jedna prema drugoj
Sile gravitacije koje djeluju na svaku od kuglica uravnotežene su elastičnim silama površine po kojoj se kotrljaju. To znači da se djelovanje ovih sila može zanemariti. Sile otpora kretanju u ovom slučaju su male, pa ni njihov uticaj nećemo uzimati u obzir. Dakle, možemo pretpostaviti da lopte međusobno djeluju samo jedna na drugu.
Sa slike 45 se može vidjeti da će se nakon nekog vremena loptice sudariti. Tokom sudara koji traje vrlo kratko vreme t, nastaće sile interakcije F 1 i F 2 koje se primenjuju na prvu i drugu loptu. Kao rezultat djelovanja sila, brzina loptica će se promijeniti. Označimo brzine kuglica nakon sudara slovima v 1 i v 2 .
U skladu sa trećim Newtonovim zakonom, sile interakcije između kuglica su jednake po veličini i usmjerene u suprotnim smjerovima:
Prema drugom Newtonovom zakonu, svaka od ovih sila može se zamijeniti umnoškom mase i ubrzanja koje je primila svaka od loptica tokom interakcije:
m 1 a 1 = -m 2 a 2 .
Ubrzanja se, kao što znate, određuju iz jednakosti:

Zamjenom sila ubrzanja u jednadžbi odgovarajućim izrazima dobivamo:
![]()
Kao rezultat smanjenja obje strane jednakosti za t, dobivamo:
m1(v" 1 - v 1) = -m 2 (v" 2 - v 2).
Grupirajmo članove ove jednačine na sljedeći način:
m 1 v 1 " + m 2 v 2 " = m 1 v 1 = m 2 v 2 . (1)
Uzimajući u obzir da je mv = p, zapisujemo jednačinu (1) u ovom obliku:
P" 1 + P" 2 = P 1 + P 2.(2)
Lijeve strane jednadžbi (1) i (2) predstavljaju ukupni impuls loptica nakon njihove interakcije, a desne strane predstavljaju ukupan impuls prije interakcije.
To znači da je, uprkos činjenici da se zamah svake od loptica mijenjao tokom interakcije, vektorski zbir njihovog momenta nakon interakcije ostao isti kao prije interakcije.
Jednačine (1) i (2) su matematički prikaz zakona održanja impulsa.
Budući da ovaj kurs razmatra samo interakcije tijela koja se kreću duž jedne prave linije, za pisanje zakona održanja količine gibanja u skalarnom obliku, dovoljna je jedna jednadžba koja uključuje projekcije vektorskih veličina na X os:
m 1 v" 1x + m 2 v" 2x = m 1 v 1x + m 2 v 2x.
Pitanja
- Šta je impuls tijela?
- Šta se može reći o smjerovima vektora momenta i brzini tijela koje se kreće?
- Recite nam o toku eksperimenta prikazanog na slici 44. Na šta on ukazuje?
- Šta znači reći da nekoliko tijela čini zatvoreni sistem?
- Formulirajte zakon održanja impulsa.
- Za zatvoreni sistem koji se sastoji od dva tijela, napišite zakon održanja količine gibanja u obliku jednačine koja bi uključivala mase i brzine ovih tijela. Objasnite šta znači svaki simbol u ovoj jednačini.
Vježba 20
- Dva automobila na navijanje, svaki težak 0,2 kg, kreću se u pravoj liniji jedan prema drugom. Brzina svakog automobila u odnosu na tlo je 0,1 m/s. Da li su vektori impulsa mašina jednaki? moduli vektora impulsa? Odredite projekciju količine gibanja svakog od automobila na os X, paralelno s njihovom putanjom.
- Koliko će se promijeniti impuls automobila od 1 tone (u apsolutnoj vrijednosti) kada se njegova brzina promijeni sa 54 na 72 km/h?
- Čovjek sjedi u čamcu koji se odmara na površini jezera. U nekom trenutku ustaje i hoda od krme do pramca. Šta će biti sa brodom? Objasnite fenomen na osnovu zakona održanja impulsa.
- Vagon težak 35 tona prilazi nepokretnom vagonu teškom 28 tona koji stoji na istom kolosijeku i automatski se spaja s njim. Nakon spajanja, automobili se kreću pravo brzinom od 0,5 m/s. Kolika je bila brzina automobila od 35 tona prije spajanja?
Zamah u fizici
U prijevodu s latinskog, “impuls” znači “gurati”. Ova fizička veličina se još naziva i "kvantiteta kretanja". U nauku je uveden otprilike u isto vreme kada su otkriveni Njutnovi zakoni (krajem 17. veka).
Grana fizike koja proučava kretanje i interakciju materijalnih tijela je mehanika. Moment u mehanici je vektorska veličina jednaka proizvodu mase tijela i njegove brzine: p=mv. Smjerovi vektora momenta i brzine uvijek se poklapaju.
U SI sistemu jedinica impulsa je impuls tijela mase 1 kg koje se kreće brzinom od 1 m/s. Dakle, SI jedinica impulsa je 1 kg∙m/s.
U proračunskim problemima razmatraju se projekcije vektora brzine i momenta na bilo koju osu i koriste se jednadžbe za ove projekcije: na primjer, ako je odabrana os x, onda se razmatraju projekcije v(x) i p(x). Po definiciji impulsa, ove veličine su povezane relacijom: p(x)=mv(x).
Ovisno o tome koja je os odabrana i gdje je usmjerena, projekcija vektora momenta na nju može biti pozitivna ili negativna.
Zakon održanja impulsa
Impulsi materijalnih tijela tokom njihove fizičke interakcije mogu se mijenjati. Na primjer, kada se dvije lopte obješene na nitima sudaraju, njihovi impulsi se međusobno mijenjaju: jedna lopta može krenuti iz stacionarnog stanja ili povećati svoju brzinu, a druga, naprotiv, smanjiti brzinu ili zaustaviti. Međutim, u zatvorenom sistemu, tj. kada tijela komuniciraju samo jedno s drugim i nisu izložena vanjskim silama, vektorski zbir impulsa ovih tijela ostaje konstantan za vrijeme bilo koje njihove interakcije i kretanja. Ovo je zakon održanja impulsa. Matematički se može izvesti iz Newtonovih zakona.
Zakon održanja količine gibanja primjenjiv je i na sisteme u kojima na tijela djeluju neke vanjske sile, ali je njihov vektorski zbir jednak nuli (na primjer, sila gravitacije je uravnotežena elastičnom silom površine). Konvencionalno, takav sistem se takođe može smatrati zatvorenim.
U matematičkom obliku, zakon održanja impulsa je napisan na sljedeći način: p1+p2+…+p(n)=p1’+p2’+…+p(n)’ (pulsi p su vektori). Za sistem sa dva tijela, ova jednačina izgleda kao p1+p2=p1’+p2’, ili m1v1+m2v2=m1v1’+m2v2’. Na primjer, u razmatranom slučaju s kuglicama, ukupan impuls obje lopte prije interakcije bit će jednak ukupnom impulsu nakon interakcije.
Momentum... Koncept koji se često koristi u fizici. Šta se podrazumijeva pod ovim pojmom? Ako ovo pitanje postavimo običnom čovjeku, u većini slučajeva dobićemo odgovor da je impuls tijela određeni utjecaj (potisak ili udarac) koji se vrši na tijelo, zbog kojeg se ono može kretati u datom smjeru. . Sve u svemu prilično dobro objašnjenje.
Zamah tijela je definicija s kojom se prvi put susrećemo u školi: na času fizike nam je pokazano kako se mala kolica kotrlja niz nagnutu površinu i gura metalnu loptu sa stola. Tada smo razmišljali o tome šta bi moglo utjecati na snagu i trajanje ovoga Iz sličnih zapažanja i zaključaka prije mnogo godina rođen je koncept zamaha tijela kao karakteristike kretanja koja direktno ovisi o brzini i masi objekta.
Sam termin je u nauku uveo Francuz Rene Descartes. To se dogodilo početkom 17. vijeka. Naučnik je objasnio zamah tijela kao ništa drugo do "količinu kretanja". Kao što je sam Descartes rekao, ako se jedno pokretno tijelo sudari s drugim, ono gubi onoliko svoje energije koliko daje drugom objektu. Potencijal tijela, prema riječima fizičara, nije nigdje nestao, već se samo prenosio sa jednog objekta na drugi.
Glavna karakteristika impulsa tijela je njegov smjer. Drugim riječima, iz ove izjave slijedi da svako tijelo u pokretu ima određeni impuls.

Formula za uticaj jednog objekta na drugi: p = mv, gde je v brzina tela (vektorska količina), m masa tela.
Međutim, impuls tijela nije jedina veličina koja određuje kretanje. Zašto ga neka tijela, za razliku od drugih, dugo ne izgube?
Odgovor na ovo pitanje bila je pojava drugog koncepta - impulsa sile, koji određuje veličinu i trajanje udara na objekt. To nam omogućava da odredimo kako se zamah tijela mijenja tokom određenog vremenskog perioda. Impuls sile je proizvod veličine udara (same sile) i trajanja njene primjene (vrijeme).

Jedna od najznačajnijih karakteristika IT-a je da ostaje nepromenjena u zatvorenom sistemu. Drugim riječima, u nedostatku drugih utjecaja na dva objekta, zamah tijela između njih će ostati stabilan onoliko dugo koliko se želi. Princip očuvanja se može uzeti u obzir iu situaciji kada je prisutan spoljašnji uticaj na objekat, ali je njegov vektorski uticaj jednak 0. Takođe, impuls se neće promeniti u slučaju kada je uticaj ovih sila neznatan. ili djeluje na tijelo vrlo kratko (kao, na primjer, kada se puca).
Upravo ovaj zakon očuvanja proganja pronalazače stotinama godina, zbunjujući stvaranje ozloglašenog „perpetual motorja“, budući da je upravo on u osnovi takvog koncepta kao što je
Što se tiče primjene znanja o takvom fenomenu kao što je tjelesni impuls, ono se koristi u razvoju projektila, oružja i novih, iako ne vječnih, mehanizama.